Roboter-Software – Projekt Digitaler Zwilling
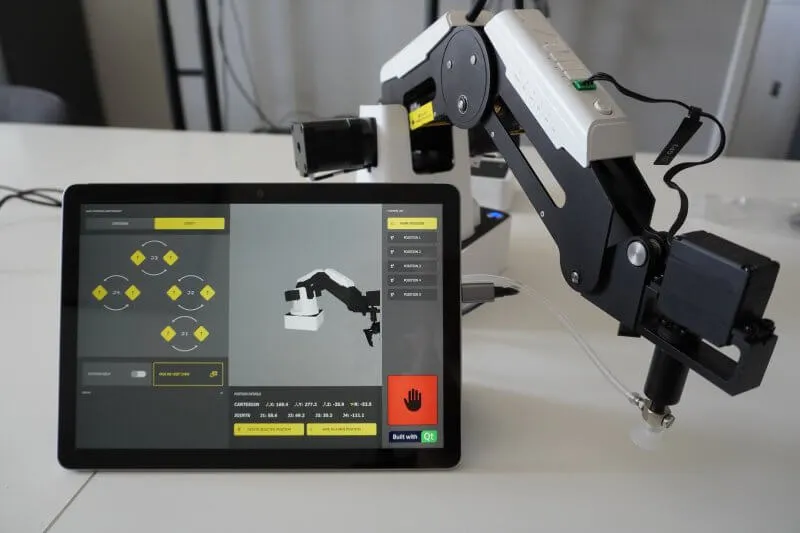
Plattformübergreifende Anwendung zur Kommunikation und Steuerung des Dobot Magician-Roboterarms. Der Betrieb des Roboterarms wird auch durch ein 3D-Modell unterstützt, das die Position und Ausrichtung des physischen Modells in Echtzeit wiedergibt.
Technologies used
In den sich schnell entwickelnden Bereichen der industriellen Automatisierung und des IoT hat Scythe Studio mit seiner innovativen Digital Twin App große Fortschritte gemacht. Diese Fallstudie befasst sich mit der Entwicklung und den Möglichkeiten unserer plattformübergreifenden Anwendung, die für die Präzisionssteuerung des Dobot Magician-Roboterarms konzipiert wurde und unser Know-how in der Qt- und C++-Entwicklung unter Beweis stellt.
Digitaler Zwilling Projekt Genesis
Die Idee entstand aus unserem Wunsch, eine greifbare Demonstration anzubieten, die potenzielle Kunden in der Industrie- und IoT-Branche fesseln könnte. Da es unpraktisch war, eine ganze Industriehalle in unserem Büro zu errichten, entschieden wir uns für eine mobilere, aber dennoch beeindruckende Demonstration: einen Roboterarm. Unsere Wahl fiel auf den Dobot Magician, der sich aufgrund seiner hervorragenden Dokumentation und seiner zugänglichen Steuerungs-API als ideal erwies.
Wenn Sie das Projekt interessant finden, können Sie gerne unsere HMI-Entwicklungsdienste in Anspruch nehmen.

Hauptziele der Digital Twin Demo
Unser Hauptziel war es, einen „digitalen Zwilling“ des Roboterarms zu entwickeln, der es den Benutzern ermöglicht, die Funktionen des Arms digital zu steuern und zu überwachen. Dieses Projekt unterstreicht unser Engagement für ein schnelles Prototyping und den Zugang zu technischen Nischenkompetenzen, einschließlich eingebetteter Systeme, verschiedener Kommunikationsprotokolle und fortgeschrittener Programmierung in C++ und Qt.
Die Funktionalitäten der Digital Twin Software
Dieses Projekt ist ein Beweis für unser Engagement für Innovation, indem wir anspruchsvolle Softwaretechnik mit praktischen Roboterfunktionen verbinden. Schauen Sie sich an, welche Funktionen genau in der Digital Twin-Demo enthalten sind.
Bewegtes virtuelles Abbild – 3D-Modell-Integration
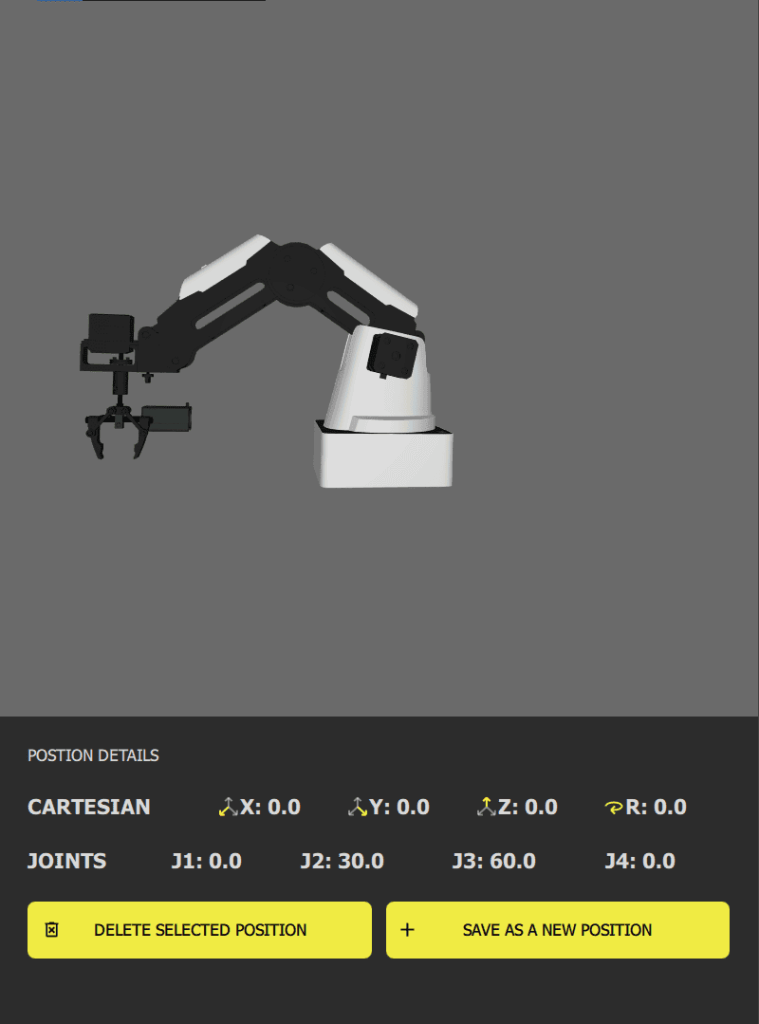
Das Herzstück unserer Digital Twin Software ist das 3D-Modell, das so konzipiert ist, dass es in perfekter Harmonie mit dem physischen Roboterarm funktioniert. Durch die Erfassung von Sensordaten in Echtzeit spiegelt unsere Software die physischen Bewegungen des Roboters in einer virtuellen Umgebung wider und erreicht so eine 1:1-Darstellung.
Diese dynamische digitale Version ermöglicht es den Bedienern, die Bewegungen des Roboterarms in Echtzeit zu visualisieren und mit ihnen zu interagieren, was das Verständnis und die Kontrolle über das physische Objekt verbessert. Diese Spiegelung zwischen dem virtuellen Modell und der physischen Welt ist nicht nur ein Feature, sondern ein entscheidender Schritt zur Schaffung nahtloser, interaktiver Spiegelwelten, in denen jede Veränderung in der physischen Welt sofort über Sensoren in der digitalen Welt reflektiert wird.
Bedienfeld und digitale Darstellung
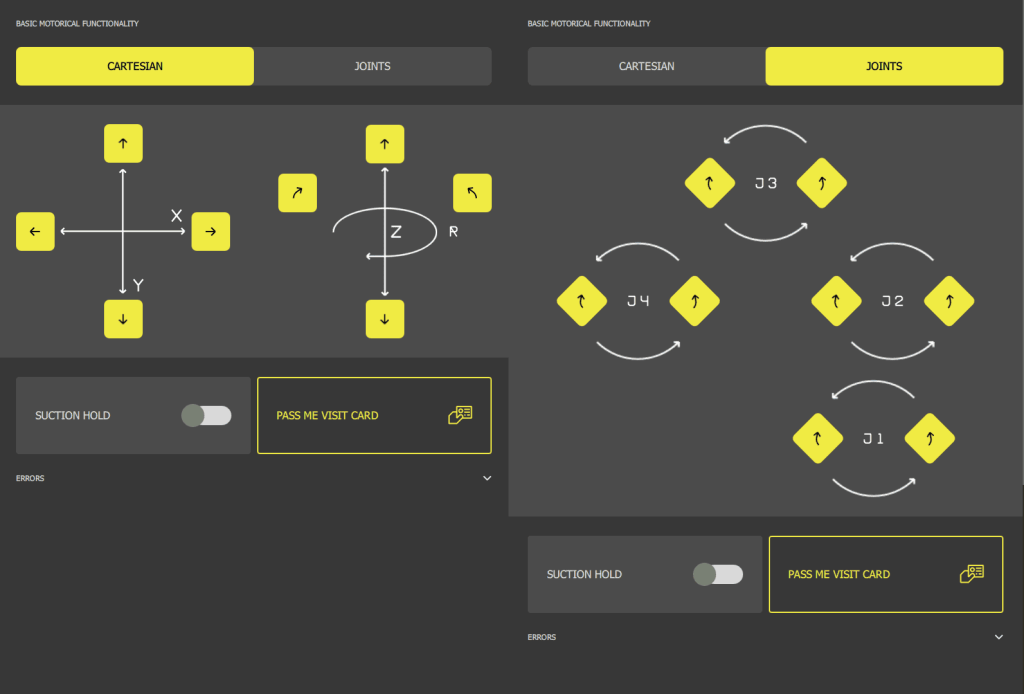
Eine der wichtigsten Funktionen des Digitalen Zwillings Das Bedienfeld ist der Einstieg für den Benutzer, um die Funktionen des Digitalen Zwillings zu beherrschen. Die Bediener können die X-, Y- und Z-Koordinaten des Arms sowie den R-Parameter, der den Drehwinkel des Armgreifers steuert, manipulieren. Der Wechsel zwischen dem kartesischen Koordinatensystem und dem Gelenksystem erfolgt mühelos über eine intuitive Benutzeroberfläche, die eine präzise Kontrolle über jedes Gelenk des Roboterarms ermöglicht:
- J1: Steuert die Drehung der Basis.
- J2: Steuert die Drehung des Motors innerhalb des Gehäuses.
- J3: Betreibt den Motor in der Mitte des Arms.
- J4: Passt das Ende des Arms an. Ein zusätzliches Merkmal dieses Bedienfelds ist die Möglichkeit, den Effektor zu wechseln – von einem Saugnapf zu Alternativen wie einem Greifer oder Stift, was den Nutzen des Arms für verschiedene Aufgaben erhöht.
Es dient Visitenkarten – Roboter bewegt physisches Objekt
Auf Messen und anderen Veranstaltungen demonstriert unser Projekt Digitaler Zwilling seinen praktischen Nutzen auf einzigartige Weise, indem es den Roboterarm zum Verteilen von Visitenkarten einsetzt! Diese Funktionalität wurde entwickelt, um die Integration digitaler Befehle mit physischen Aktionen zu demonstrieren.
Durch Drücken einer großen grünen Taste oder durch Auswahl einer digitalen Taste auf dem Bildschirm aktiviert der Roboter einen speziell entwickelten Mechanismus zum Verteilen von Visitenkarten. Diese Funktion zeigt nicht nur die Fähigkeit des Roboters, mit physischen Objekten zu interagieren, sondern unterstreicht auch unser internes Know-how in C-Programmierung und Elektronik, das solche innovativen Integrationen ermöglicht.

Positionsmanagement mit lokalen Daten
Effizienz und Präzision sind bei Roboteroperationen von größter Bedeutung. Unsere Digital Twin Software verbessert dies, indem sie eine Liste von Lieblingspositionen als Koordinaten in einer lokalen Datenbank speichert. Die Benutzer können diese Positionen mühelos verwalten – durch Auswahl einer gespeicherten Position aus der Liste wird der Roboterarm angewiesen, diesen Punkt genau anzufahren.
Die Aufnahme einer „Ausgangsposition“ am Anfang der Liste stellt sicher, dass die Benutzer den Arm schnell in seine Ausgangsposition zurücksetzen können, was den Arbeitsablauf optimiert und die praktische Anwendung der Verwaltung virtueller Modelle und physischer Objekte in einem System demonstriert.
Sicherheitsmerkmale
Die Sicherheit von Bedienern und Maschinen ist ein entscheidender Aspekt jeder industriellen Anwendung. Unsere Digital Twin Software enthält eine robuste „Sicherheitsstopp“-Taste, eine kritische Funktion, die im Notfall, z. B. bei einem Kurzschluss oder unerwarteten Bewegungen, alle Operationen des Roboterarms sofort stoppt. Diese Funktion unterstreicht, wie wichtig es ist, zuverlässige Sicherheitsmaßnahmen in digitale Systeme zu integrieren, die physische Vorgänge steuern, um eine sichere Umgebung für Benutzer und Geräte gleichermaßen zu gewährleisten.
Qt als digitale Zwillingstechnologie
Scythe Studio nutzt Qt, ein leistungsstarkes C++-Framework, für die Entwicklung der meisten Projekte. Diese Wahl ist auf die Robustheit und Vielseitigkeit von Qt zurückzuführen, das sich besonders für komplexe Projekte eignet, die eine hohe Leistung und plattformübergreifende Funktionalität erfordern.
Die visuellen Aspekte unserer Digitalen Zwillingssoftware werden mit QML, einer deklarativen Hochsprache, die 3D-Integrationen nahtlos unterstützt, entwickelt. In diesem Abschnitt werden die Vorteile der Verwendung von Qt und unsere Erfahrung bei der Maximierung seines Potenzials für die Bereitstellung hervorragender digitaler Zwillingslösungen hervorgehoben.
Großartig für eingebettete Plattformen
Die plattformübergreifende Natur von Qt war für die flexible Entwicklung und den Einsatz unserer Digital Twin-Technologie von entscheidender Bedeutung. Während der Entwicklungsphase haben wir für die ersten Tests ein Windows-Tablet verwendet, weil es eine benutzerfreundliche Oberfläche hat und weit verbreitet ist.
Die wahre Stärke von Qt zeigte sich jedoch, als wir unser Projekt erfolgreich auf eingeschränkteren Plattformen wie den MCU-Geräten der STM32-Familie und dem Raspberry Pi 4 einsetzten. Diese Einsätze unterstreichen die Anpassungsfähigkeit von Qt und unsere Fähigkeit, maßgeschneiderte Lösungen zu entwickeln, die effizient auf unterschiedlicher Hardware laufen und sicherstellen, dass unsere digitale Zwillingssoftware in verschiedenen industriellen Umgebungen einwandfrei funktioniert.
Höhere Leistung dank C++
Das Herzstück von Qt ist C++, eine leistungsstarke Low-Level-Programmiersprache, die für ihre Leistungseffizienz bekannt ist. Dieser grundlegende Aspekt ermöglicht es uns, das volle Potenzial der Hardwarefunktionen zu nutzen und sicherzustellen, dass unsere Digital Twin-Anwendungen mit optimaler Leistung laufen.
Die direkte Manipulation von Hardwareressourcen, die durch C++ erleichtert wird, ermöglicht es unseren Anwendungen, Daten in Echtzeit zu verarbeiten und komplexe 3D-Modelle ohne Verzögerung zu rendern, was sie ideal für anspruchsvolle industrielle Anwendungen macht, bei denen Präzision und Zuverlässigkeit von größter Bedeutung sind.
Ein weiterer Vorteil von C++ als Kerntechnologie besteht darin, dass es sich leicht in C-Code integrieren lässt, der normalerweise in eingebetteten Projekten verwendet wird. Das ist ein großer Vorteil, insbesondere für ältere Projekte, die einen Schritt in Richtung moderner Technologien machen wollen.
Kosten senken mit Rapid QML Prototyping
QML, eine Komponente des Qt-Frameworks, revolutioniert die Art und Weise, wie Benutzeroberflächen entwickelt werden. QML ist bekannt für seine Rapid-Prototyping-Funktionen und ermöglicht es Entwicklern, reichhaltige, interaktive Benutzeroberflächen in einem Bruchteil der Zeit zu erstellen, die mit anderen Technologien benötigt wird.
Eines der hervorstechendsten Merkmale von QML ist seine Kompatibilität mit Figma, einem beliebten UI-Design-Tool. Diese Kompatibilität ermöglicht es UI-Designern, Figma-Projekte direkt in lauffähigen QML-Code zu konvertieren, was die Entwicklungszeit drastisch reduziert und es den Ingenieuren ermöglicht, sich auf die Verbesserung der Kernfunktionen zu konzentrieren. Durch den Einsatz von QML beschleunigt Scythe Studio nicht nur den Entwicklungsprozess, sondern senkt auch die Kosten. Diese Einsparungen können wir an unsere Kunden weitergeben, während wir gleichzeitig realitätsgetreue, robuste digitale Zwillingsschnittstellen liefern.

Entwicklung von digitalen Zwillingen
Da das Projekt weitgehend hardwarebasiert war, untersuchten wir zunächst eingehend die Möglichkeiten, die der Roboterrahmen bot. So konnten wir die zu erfüllenden Aufgaben klar definieren. Dann haben wir die gesamte Arbeit für das Team nach der Scrum-Methodik geplant und uns an die Arbeit gemacht.
Jakub Wincenciak – unser Chief Operating Officer, sagte:
„Ich hatte die Gelegenheit, persönlich an dem Projekt zu arbeiten und es zu beaufsichtigen, und ich muss zugeben, dass ich an unserer Arbeit liebe, reale Dinge zu erledigen. Der digitale Zwilling ist zwar nur eine virtuelle Nachbildung des Roboters, aber das ist es, was Unternehmen aus der Schwerindustrie brauchen. Sie müssen den gesamten Herstellungsprozess oder andere Arten von Vorgängen visualisieren, die durchgeführt werden. Projekte an der Schnittstelle zwischen Programmierung und Hardware sind mehr als befriedigend.“
Wir haben die einmalige Gelegenheit, an verschiedenen Projekten aus unterschiedlichen Bereichen zu arbeiten. Es geht nicht nur um industrielle Automatisierung oder Robotik, sondern auch um Medizintechnik, Automotive und vieles mehr.
Schlussfolgerung
Bei Scythe Studio setzen wir unsere Fachkenntnisse in C++ und Qt ein, um fortschrittliche Lösungen zu entwickeln, die unseren Kunden einen Vorsprung in der Automatisierung und Robotik verschaffen. Dieses Projekt unterstreicht unsere Fähigkeit, eine einfache Idee in ein hochentwickeltes Werkzeug zu verwandeln, das unseren Kunden greifbare Vorteile bringt.
Neueste Projekte
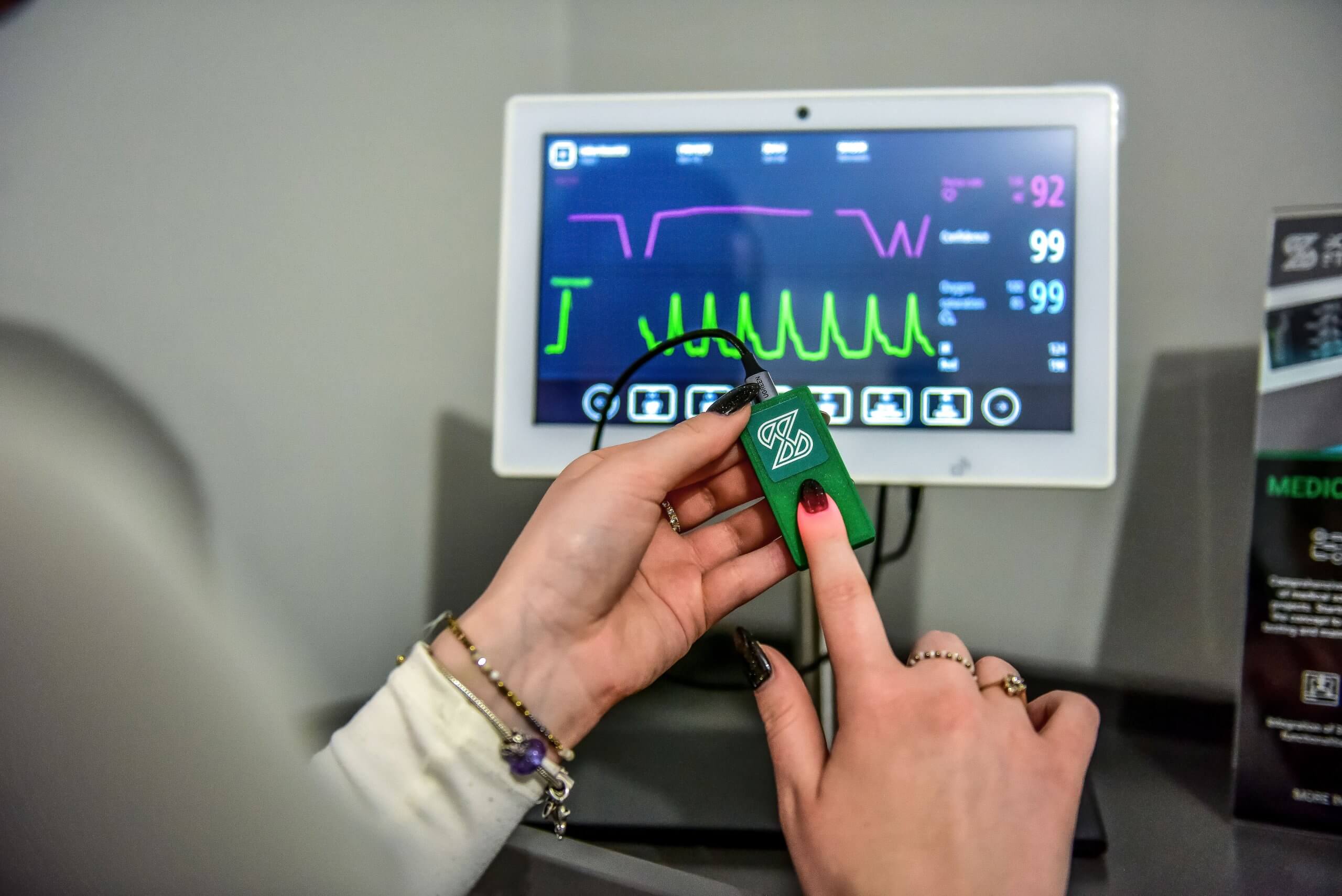
Patienten-Vitalparameter-Monitor
Der Patienten-Vitalparameter-Monitor verfügt über ein Pulsoximeter und einen Herzfrequenzsensor. Er besteht aus einem Sensor und einem Mikrocontroller. Er kommuniziert mit dem Sensor, erhält Daten von ihm und sendet diese über ein USB-Kabel an einen Computer.
Eingebettete Anwendung für medizinische Laservorrichtung
Anwendung, die auf einem eingebetteten Gerät läuft und den Betrieb eines medizinischen Lasers simulieren soll. Der Benutzer kann einen der vorbereiteten Vorgänge auswählen oder einen eigenen mit voreingestellten Parametern erstellen. Die Anwendung simuliert den Ablauf des Verfahrens.

Brain Viewer – 3D-Modell des menschlichen Gehirns
Diese Fallstudie zeigt den Entwicklungsprozess und die Möglichkeiten des Brain Viewers - einer Anwendung zur Darstellung eines 3D-Modells des menschlichen Gehirns. Die Anwendung veranschaulicht die Herausforderungen, mit denen wir bei unseren Projekten für die medizinische Industrie täglich konfrontiert sind, und wie wir sie meistern!